Motivation: Catheter-based procedures require the guidance of a catheter to a target region to deliver therapy or to remove tissue samples for diagnosis. Often, these catheters need to be re-introduced or withdrawn slightly to correct for the error in targeting due to the catheter and soft-tissue interaction. Because of poor catheter placement, multiple insertion attempts at a single site are often made by the physician. Multiple insertions lead to a more invasive procedure and cause patient discomfort. Achieving precision in targeting is challenging. The initial alignment of the catheter with the target can be achieved with robotic assistance. Due to catheter-tissue interaction and non-homogeneous nature of the soft-tissue, deflection occurs after the catheter is inserted into the soft-tissue. Manipulating the catheter at the base provides limited control over the catheter trajectory after the insertion. Targeting errors may lead to false negatives in biopsy procedures, imprecise delivery of radiation therapy in brachytherapy procedures and ablation of healthy tissue in radio-frequency ablation procedures. To overcome the targeting challenges in catheter-based procedures, a discretely actuated steerable cannula was developed. We are interested in using the cannula to introduce both diagnostic and therapeutic tools, which may otherwise be difficult to deliver to the appropriate location.
Project Highlights:
Cannula Design
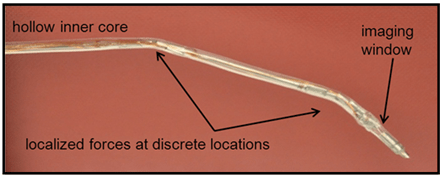
1st generation prototype: The cannula is composed of metallic straight segments that are connected by shape memory alloy (SMA) actuators along its length. The SMA actuators that are mounted on the outer surface of the cannula enable bending of the cannula locally at discrete locations when the SMA is actuated. There is very small clearance (typically 1 mm) between the adjacent links to prevent short-circuit. The sheath that covers the cannula and the SMA actuators that join the straight segments are rigid enough to prevent bending during insertion into the soft tissue. The SMA wires are attached mechanically by crimping the wire at the tips via use of stainless steel rings. Enamel-coated wires are wrapped around the tip of the SMA wires for electrical connection. Resistance temperature detectors (RTD) are used to monitor the temperature of the SMA actuators. The discretely actuated steerable cannula can be potentially used to deliver diagnostic and therapeutic tools through the hollow inner core of the cannula. For instance, the cannula can aid in diagnosis with the use of an OCT probe. An imaging window was added to perform micro-scale imaging with a side-viewing OCT probe.
Since the straight segments are conductive, only one SMA actuator can be used at each joint. Once the SMA actuation is complete, the joint does not go back to the straight configuration. The amount of the recovery depends on the tissue relaxation.
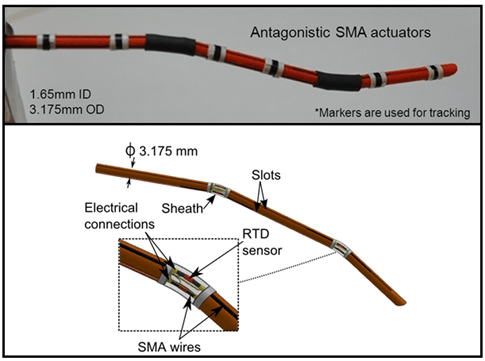
2nd generation prototype: To overcome the limitation of unilateral bending, the straight segments should be non-metallic and antagonistic SMA actuators need to be used. In the 2nd generation prototype, straight segments were painted with high temperature enamel coating for electrical insulation. Four slots were machined along the length of each straight segment. There is one pair of antagonistic actuators at each joint and up to four SMA wires can be placed. The joints were covered with non-conductive rubber sheath for heat isolation. For electrical connection, enamel coated wires were used and attached on the SMA wire using silver filled conductive epoxy. Mini RTD sensors were used as temperature sensors and they were attached to the SMA actuators using heat shrink tubes.
Arc- shaped SMA Actuator
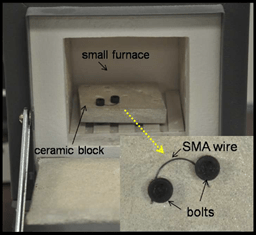
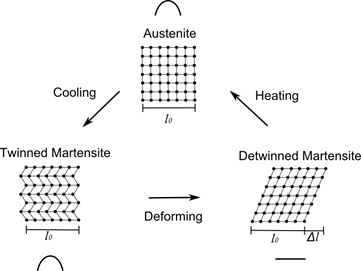
SMA wires are annealed in an arc shape through a customized annealing process. The SMA actuator has one-way shape memory effect (uni-directional bending) after the annealing process is completed. Upon heating the SMA above its phase-transition temperature (martensite to austenite phase), the SMA actuator transfers to the desired arc shape. Cooling down the SMA wire causes a transformation from austenite to twinned martensite without any shape change. Therefore for each joint, antagonistic SMA wires are needed for bending in either direction. Resistive heating is used to heat the SMA actuators. As the temperature of the SMA wire increases, it transforms into an arc thereby generating joint torques.
SMA Characterization
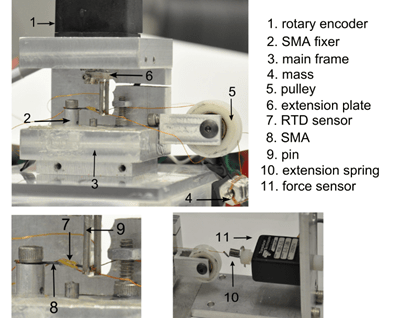
An experimental setup was developed to characterize the arc-shaped SMA actuator. The apparatus consists of a rotary encoder and a pin attached a fixed distance away from the center of the encoder. As the SMA wire transforms into an arc shape, it rotates the pin. From the geometry of the setup, the encoder reading can be related to the radius of curvature of the SMA wire (hence the strain in the SMA wire). There is a cable connected to the SMA wire, and it can be routed around the screw and connected to a mass via pulley to apply constant stress or it can be connected to the extension spring to apply variable loading. A step-by-step characterization procedure was developed to find the parameters of the SMA actuator that are required in the constitutive model. Tanaka’s model is used as the constitutive model of the SMA that describes the relation between the strain, external stress and the temperature of the SMA.
Control of the Cannula
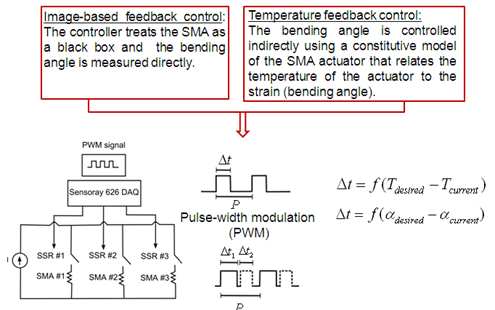
We propose a combined image feedback and temperature feedback approach to control the bending angle at each joint. A pulse width modulation-based control scheme was implemented to control the SMA actuators. PWM is advantageous since the current supplied to the SMA actuator can be controlled by changing the pulse width of the digital signal and there is no need for a controllable current source. Another advantage of using PWM is that multiple SMA actuators can be actuated in the same heating period, P, using a single power supply (time-sharing). The heating time, Δt, of the SMA actuator is determined by the control law, f. SMA actuator has also been fully characterized to use temperature feedback to control the strain in the SMA actuators in case of poor image feedback quality from the imaging modality.
Motion Planning
The discretely actuated steerable cannula enables trajectories that are not limited to straight-line trajectories. Motion planning algorithms were developed to generate trajectories between the insertion point to the soft-tissue and the target location. For the task of reaching a desired position in a 2D plane without any restriction on the tip orientation, a cannula with more than one joint becomes redundant. Using configuration control approach, redundancy of the cannula was utilized to find an optimum path that satisfies multiple tasks. The generated trajectory avoids anatomical structures represented as obstacles and stays within the joint limits of the SMA actuator.
Needle-based procedures are commonly performed using intra-operative image guidance. The success of image-guided procedures highly depends on the ability to precisely locate the needle. An out-of-plane detection method based on Hough circle transform was implemented to locate the tip of the discretely actuated steerable cannula. An in-plane tracking algorithm based on optical flow was also developed to obtain the shape of a cannula.
Publications:
Archival Publications:
- Elif Ayvali, Chia-Pin Liang, Mingyen Ho, Yu Chen, and Jaydev P. Desai, “Towards A Discretely Actuated Steerable Cannula for Diagnostic and Therapeutic Procedures”, The International Journal of Robotics Research, 31(5), pp. 588-603, 2012; DOI: 10.1177/0278364912442429
- Elif Ayvali, and Jaydev P. Desai, “Pulse width modulation–based temperature tracking for feedback control of a shape memory alloy actuator”, Journal of Intelligent Material Systems and Structures(Published online before print, September 9, 2013), DOI:10.1177/1045389X13502576.
Refereed Conference Publications:
- Elif Ayvali and Jaydev P. Desai,“Accurate in-plane and out-of-plane ultrasound-based tracking of the discretely actuated steerable cannula”, IEEE International Conference on Robotics and Automation (ICRA 2014), Hong Kong, China, May 31-June 7, 2014.
- Elif Ayvali, Mingyen Ho, and Jaydev P. Desai, “A novel discretely actuated steerable probe for percutaneous procedures”, In 12th International Symposium on Experimental Robotics (ISER 2010), New Delhi, India, December 18-21, 2010.
- Elif Ayvali, and Jaydev P. Desai, “Towards a discretely actuated steerable cannula”, In IEEE International Conference on Robotics and Automation (ICRA 2012), Saint Paul, MN, May 14-18, 2012.
- Elif Ayvali, and Jaydev P. Desai, “Motion planning for the discretely actuated steerable cannula”, In IEEE International Conference on Biomedical Robotics and Biomechatronics (BIOROB 2012), June 24-27, Roma, Italy.
Patents:
- Steerable Probe for Percutaneous Procedures, US Non-provisional: filed in May 2013.
