Motivation: As we desire robots to become ever more flexible in their utility and application, robots will need to be capable of manipulating a diversifying set of objects. Often, graspers seem to suffer from either being overly simple (e.g. two-jaw gripper), or very complex and difficult to use and automate (e.g. humanoid hand). While the goal of many graspers seems to be directed towards achieving human capability, even the human hand has difficulty with some objects and tasks (e.g. palming a basketball or picking a coin off a table). This is, in part, because contact from a human hand is limited to pushing. Utilizing astrictive technology, such as suction or adhesion, enables pulling contact forces and offers the potential to further expand the range of object shapes and sizes able to be grasped by a single manipulator. Further, using the passive reaction forces resulting from contact with the object may limit the required complexity, making it easier to grasp effectively.

Project Highlights:
Development of a Self-Sealing Suction Cup
While suction cups have been used in robotics and automation for a long time, a traditional suction cup connected to a vacuum line presents a potential leak point if the cup is not effectively sealed on an object. So if we were to pick up a dime off a table, we would need a single, small suction cup. However, that one small suction cup would be incapable of grasping a basketball, so we would need many suction cups. These additional cups would then prevent a single cup from achieving sufficient pressure differential when grasping the dime. Therefore, we developed a self-sealing suction cup.
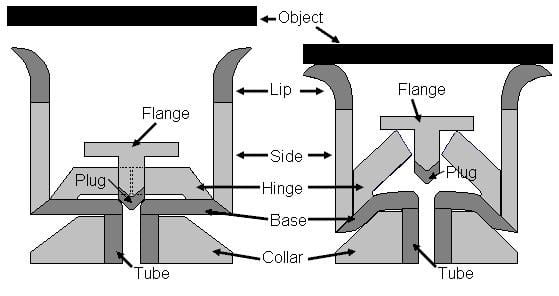
When not in contact with an object, a plug sits nominally in the suction port, automatically sealing the hole and preventing leakage. When contact occurs, the passive reaction forces cause a lever action, unsealing the cup and allowing it to engage on the object. Upon release, a spring returns the plug to its nominal position. The image below shows the working principle with a cross-sectional view of the cup in its nominal and compressed/engaged states. Note that the restoring springs are not in this plane.
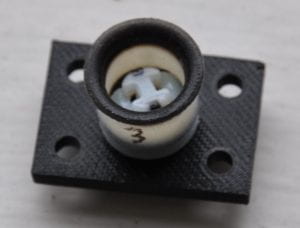
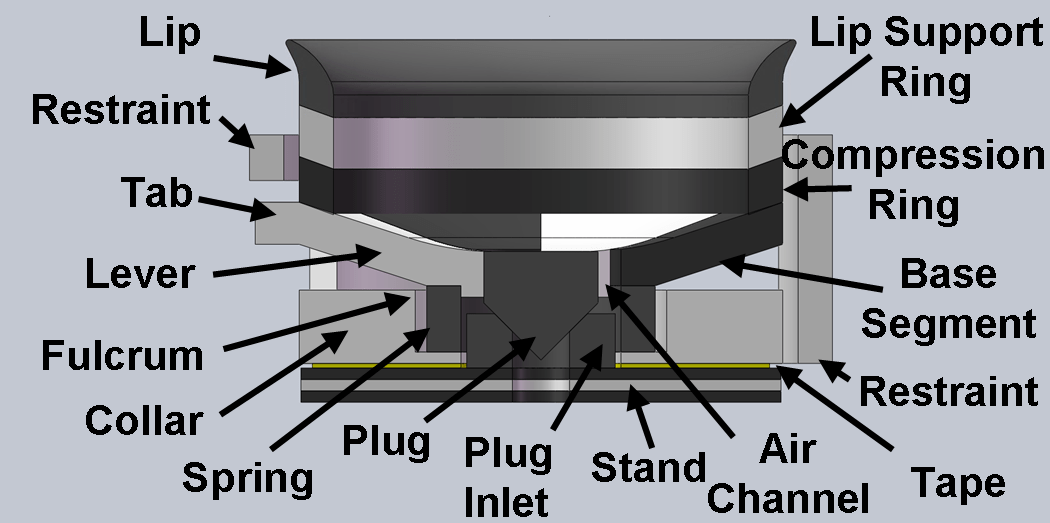
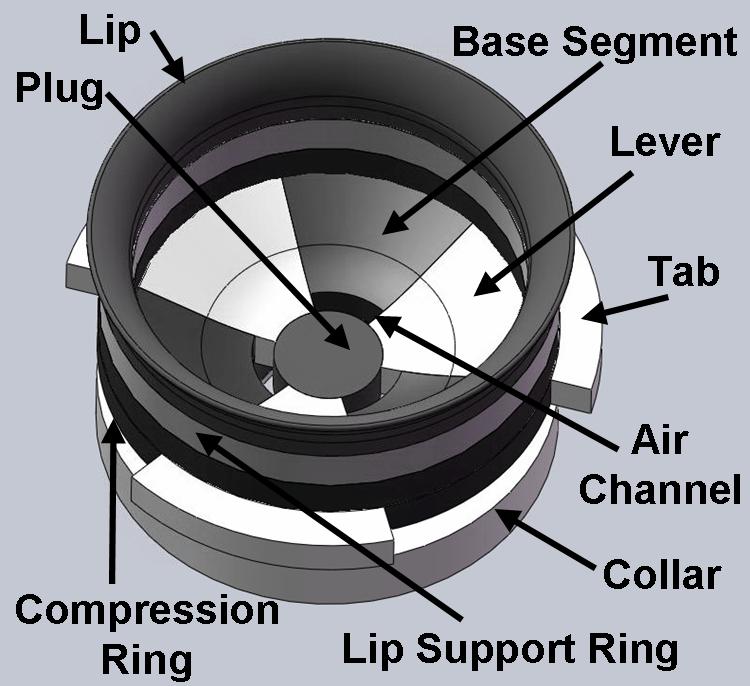
To reduce the size of the cup further and also improve its robustness to torsion and shear forces, we were able to consolidate the original functions into fewer components and incorporate a restraining ring.
End Effector Development
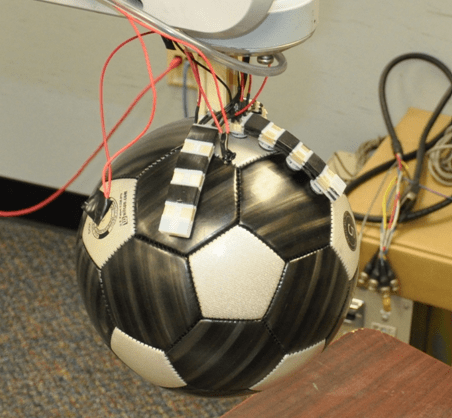
While our self-sealing suction cup technology could be applied to virtually any grasper, we wanted to showcase the technology on a novel grasper utilizing similar principles of simplicity. As such, we have designed and manufactured a three-finger hand capable of supporting 13 self-sealing suction cups. The fingers are configured to enable opposing forces or a spherical grasp. In addition, the palm of the grasper can approach a table from the side without running into it. Shape memory alloy (SMA) wires serve as our actuators for bending each finger of the hand independently.



Grasping
Using our original, unactuated grasper, we were able to manually grasp a very wide range of common household objects using a maximum of only 4 cups. We hope to show similar functionality using our actuated grasper in the near future.

a) TV remote. b) Pill bottle. c) Glue stick. d) Eye glasses. e) Fork. f) Disposable bottle. g) Toothpaste. h) Coffee cup/mug. i) Bowl. j) Plate. k) Book. l) Cell phone. m) Bar of soap. n) Paper money. o) Mail. p) Keys. q) Shoe. r) Table knife. s) Medicine box. t) Credit card. u) Coin (dime). v) Pillow. w) Hairbrush. x) Non-disposable bottle. y) Wallet. z) Magazine. aa) Soda can. ab) Newspaper. ac) Scissors. ad) Wrist watch. ae) Purse. af) Lighter. ag) Compact disc. ah) Telephone receiver. ai) Full wine bottle. aj) Full wine glass. ak) Light bulb. al) Lock. am) Padded volleyball. an) Wooden block.
Publications:
- Chad C. Kessens and Jaydev P. Desai, “Design, Fabrication, and Implementation of Self-Sealing Suction Cup Arrays for Grasping,” IEEE International Conference on Robotics and Automation (ICRA), May 2010, Anchorage, AK, USA.
- Chad C. Kessens and Jaydev P. Desai, “A Self-Sealing Suction Cup Array for Grasping,” ASME Journal of Mechanisms and Robotics, vol. 3, no. 4, November 2011.
Patents:
- Chad C. Kessens and Jaydev P. Desai, “System, Method, and Apparatus for Suction Gripping,” Patent No. 8382174, Filed Oct. 8 2010.
