Motivation: Brain tumors are among the most feared complications of cancer and they occur in 20-40% of adult cancer patients. Despite numerous advances in treatment, the prognosis for these patients is poor, with a median survival of 4-8 months. The primary reasons for poor survival rate are the lack of good continuous imaging modality for intraoperative intracranial procedures and the inability to remove the complete tumor tissue due to its placement in the brain and the corresponding space constraints to reach it. To overcome the above limitations, we envision developing a Minimally Invasive Neurosurgical Intracranial Robot (MINIR), which would be operated in an intraoperative MRI environment.

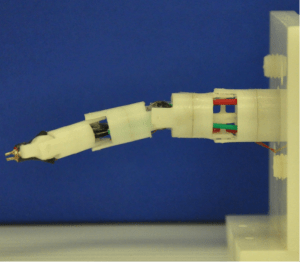
Prototypes of MINIR: brass robot (top), plastic robot (bottom)
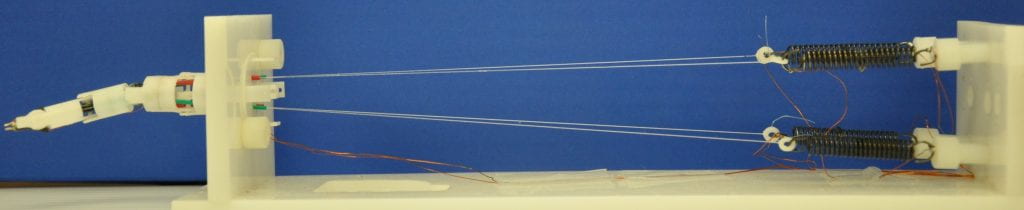
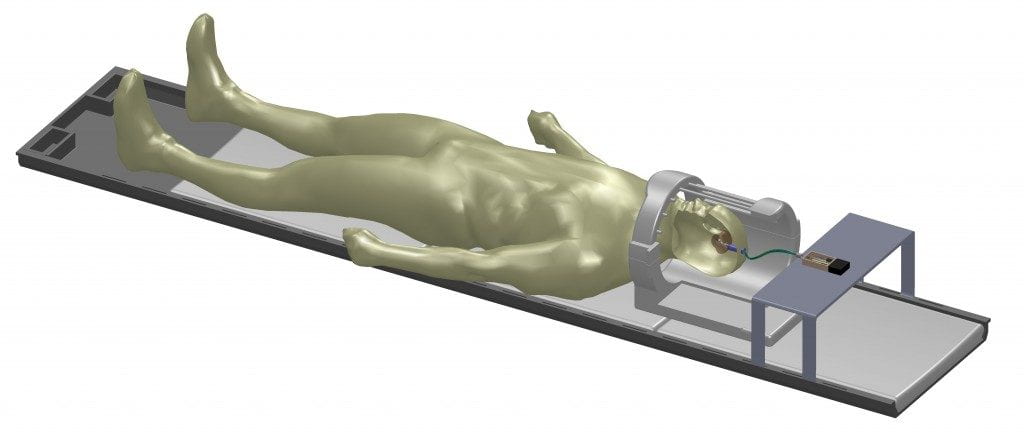
Experimental setup of MINIR
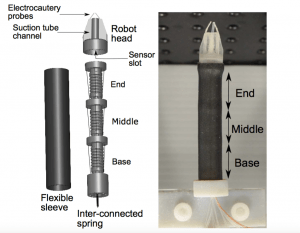
Latest prototype of MINIR-II (fully 3D-printed except the cautery probes and suction tube)

Experimental platform with MINIR-II and the cooling-module integrated SMA spring actuators
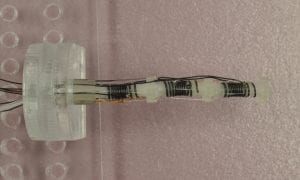
Prototype of SMA spring-based MINIR-II for active stiffness modulation
Project Highlights: We envision MINIR to be under the direct control of a human operator, with targeting information obtained exclusively from frequently-updated MRI. MINIR will be fully MRI compatible, so that frequently-updated MRI can be used to provide virtual visualization of the target by the human operator as the target’s 3-dimensional shape changes during tumor removal. The first phase of the project (NIH R21 grant) that resulted in two working prototypes was completed by Mingyen Ho (graduated with Ph.D. in 2013).
The second phase of the project (NIH R01 grant) aimed at developing a fully functioning prototype started in September 2012. This project is currently being done in collaboration with the University of Maryland School of Medicine, Baltimore.
Description of MINIR-II: A 3-D printed spring-based continuum robot is developed consisting of three segment (6 DoFs) and is tendon driven by remotely-placed actuators. SMA spring actuators with integrated cooling modules (silicone tubes) are used to actuate the robot for manipulation at higher bandwidth with heat transfer models for the actuators developed and verified. We also delve into the capability of the robot to perform stiffness modulation by replacing the plastic spring robot segments with SMA spring segments and investigate the changes in robot stiffness under the influence of tendon locking and segment stiffening. Tests have been done in dead animal tissues (e.g. cow brain) under MRI as we collaborate with University of Maryland School of Medicine to integrate MR image tracking with the robotic surgical procedure. The project is moving towards development of the entire system with focus on placement of the robot on the skull, ease of use of the robot in an actual neurosurgery scenario, and the possibility of using non-magnetic piezoelectric motors for enhanced reliability.
Sponsor: NIH R01 Grant and NIH R21 Grant.
Personnel: Shing Shin Cheng
Collaborators: J. Marc Simard, Rao Gullapalli, Satyandra K. Gupta, Taehoon Shin, Mahamadou Diakite, Sagar Chowdhury.
Media:
Newsroom from NIH: Robots Could One Day Help Surgeons Remove Brain Tumors
Health News from NPR: Why Brain Surgeons Want Help from a Maggot-Like Robot
Archival Publications
- Shing Shin Cheng, Yeongjin Kim, and Jaydev P. Desai, “Modeling and Characterization of SMA Springs with Water Cooling Strategy in a Neurosurgical Robot”, Journal of Intelligent Material Systems and Structures,2016. (Accepted for publication)
- Mingyen Ho, Yeongjin Kim, Shing Shin Cheng, Rao Gullapalli, and Jaydev P. Desai. “Design, development, and evaluation of an MRI-guided SMA spring-actuated neurosurgical robot.” The International journal of robotics research, no. 8 (2015): 1147-1163.
- Mingyen Ho, Alan B. McMillan, J. Marc Simard, Rao Gullapalli, and Jaydev. P. Desai, “Toward a Meso-Scale SMA-Actuated MRI-Compatible Neurosurgical Robot”, IEEE Transaction on Robotics, vol. 28, no. 1, pages 213-222, 2012.
- Ananthanarayanan, L. Ehrlich, Jaydev P. Desai, and S. K. Gupta, “Design of revolute joints for in-mold assembly using insert molding,” ASME Journal of Mechanical Design J. Mech. Des. 133(12), 2011.
Refereed Conference Publications
- Shing Shin Cheng, Yeongjin Kim, Jaydev P. Desai, “Towards Real-Time Control of a Neurosurgical Robot: MINIR-II,” 2015 International Symposium on Robotics Research (ISRR 2015)
- Kim, Yeongjin, and Jaydev P. Desai. “Design and kinematic analysis of a neurosurgical spring-based continuum robot using SMA spring actuators.” In Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on, pp. 1428-1433. IEEE, 2015.
- Shing Shin Cheng and Jaydev P. Desai, “Towards High Frequency Actuation of SMA Spring for the Neurosurgical Robot – MINIR-II,” 2015 IEEE International Conference on Robotics and Automation (ICRA 2015), May 2015, pp. 2580-2585, DOI: 10.1109/ICRA.2015.7139546.
- Wenxue Zhao, Jaydev P. Desai, “Towards the development of a new tendon-driven minimally invasive neurosurgical intracranial robot,” Proceedings of ASME 2014 Dynamic Systems and Control Conference, 2014.
- Mingyen Ho and Jaydev P. Desai, “Modeling, Characterization and Control of Antagonistic SMA Springs for use in a Neurosurgical Robot”, IEEE International Conference on Robotics and Automation, 2013.
- Mingyen Ho and Jaydev P. Desai, “Characterization of Antagonistic SMA Spring Actuators for use in a MRI-Compatible Intracranial Robot”, In ASME Dynamic Systems and Control Conference – DSCC 2012, Ft. Lauderdale, FL, October 17-19, 2012.
- Mingyen Ho and Jaydev P. Desai, “Towards the Development of a SMA-Actuated MRI-Compatible Tendon-Driven Neurosurgical Robot”, In IEEE International Conference on Robotics and Automation – ICRA 2012, Saint Paul, MN, May 14-18, 2012.
- Arvind Ananthanarayanan, Leicester Ehrlich, Mingyen Ho, Jaydev P. Desai and Satyandra K. Gupta, “Embedding Shape Memory Alloy Actuators in Miniature Articulating Polymer Structures Using In-Mold Assembly”, In North American Manufacturing Research Conference – NAMRC 40, University of Notre Dame, IN, June 4-8, 2012.
- Mingyen Ho and Jaydev P. Desai, “Design of a MRI-compatible tendon-driven neurosurgical robot”, In ASME Dynamic Systems and Control Conference – DSCC 2011, Arlington, VA, October 31~November 2, 2011.
- Mingyen Ho, Michael Koltz, J. Marc Simard, Rao Gullapalli, Jaydev P. Desai, “Towards a MR image-guided SMA-actuated neurosurgical robot”, In IEEE International Conference on Robotics and Automation – ICRA 2011, Shanghai, China, May 9~13, 2011.
- Ananthanarayanan, F. Bussemmer, Jaydev P. Desai, and S. K. Gupta, “Fabrication of highly articulated miniature snake robot structures using in-mold assembly of compliant joints,” International Symposium on Experimental Robotics (ISER), New Delhi, India, December 2010.
- Mingyen Ho and Jaydev P. Desai, “Towards a MRI-Compatible Meso-Scale SMA-Actuated Robot using PWM Control”, In Third IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics – BioRob 2010, Tokyo, Japan, September 26-29, 2010.
- Ananthanarayanan, L. Ehrlich, Jaydev P. Desai, and S. K. Gupta, “Design of revolute joints for insert molding: A step towards realizing low cost highly articulated robot structures,” ASME Design for Manufacturing and Lifecycle Conference, Montreal, Canada, August 2010.
- Mingyen Ho, and Jaydev P. Desai, “Characterization of SMA actuator for application in robotic neurosurgery”, in 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society – EMBC 2009, Minneapolis, MN, September 2-6, 2009.
- Nicholas Pappafotis, Wojciech Bejgerowski, Rao Gullapalli, Marc Simard, Satyandra K. Gupta, and Jaydev P. Desai, “Towards Design and Fabrication of a miniature MRI-compatible Robot for Applications in Neurosurgery”, In Proceedings of the ASME 2008 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, IDETC/CIE, 2008.
