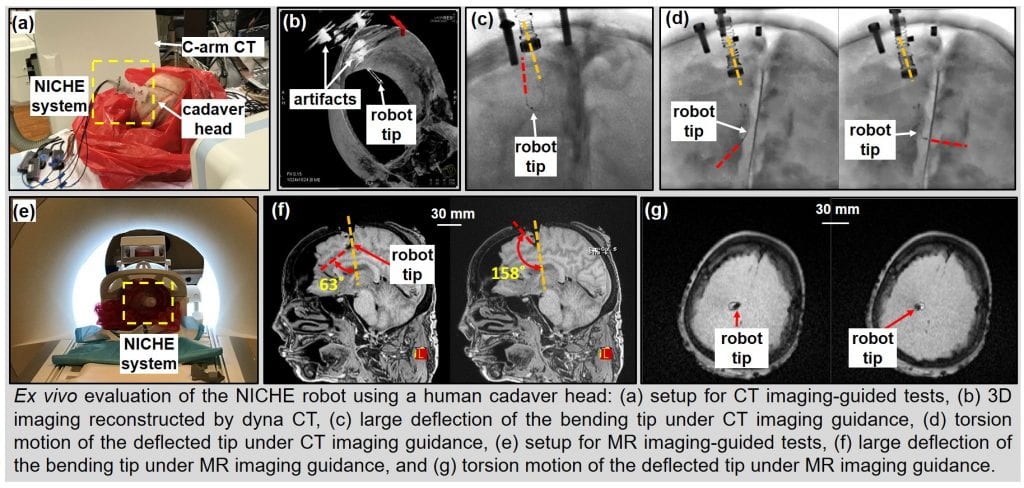
Motivation: Spontaneous intracerebral hemorrhage (ICH) occurs in millions of people worldwide every year. Interventional procedures are required to immediately remove ICH and prevent further injury from affecting brain function. Robot-assisted MIS has emerged as an optimal solution due to its reduced trauma and short recovery time. To avoid collateral manipulation of brain structures, we have developed a meso-scale neurosurgical intracerebral hemorrhage evacuation (NICHE) robot.
Project Highlights: By utilizing SMA actuators and 3D-printed plastic structures, the entire system is compact and lightweight. Thus, it can be directly mounted on a human skull and easily accommodated within a CT or MRI scanner for intra-operative image-guided procedures. The NICHE robot consists of an 8-mm diameter SMA torsion actuator and a distal SMA bending tip. By synchronizing the motion of these two actuation modules and equipping the NICHE robot with electrocautery probes and suction tubing, the robot can be manipulated to evacuate ICH. The SMA torsion actuator is comprised of two antagonistic SMA torsion springs, which are individually heated to facilitate the bi-directional motion of the actuator. We have developed a constitutive model of the SMA torsion actuator and analyzed its characteristics including motion range and block torque with respect to various design parameters to optimize the actuator design.
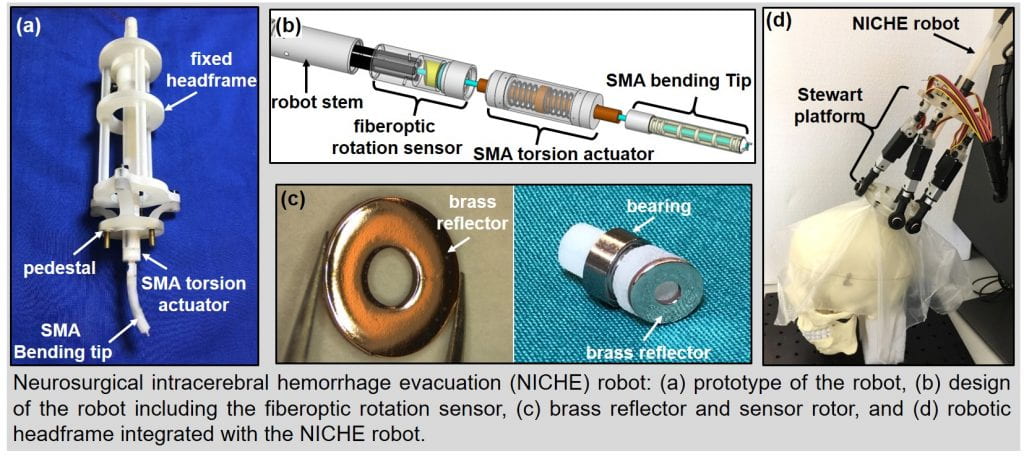
For SMA bending modules, we have developed a planar bending sensor by using flexible adhesive to combine two FBG fibers with an ultra-thin superelastic nitinol strip made using wire EDM. When the sensor is deflected, axial normal strain is induced in both FBG fibers due to the shear stress in the adhesive, resulting in a wavelength shift of the reflected light. Due to the geometric symmetry of the sensor, the difference in the wavelength shifts of the two fibers is exclusively determined by the curvature of the sensor, regardless of temperature variation due to SMA actuation. A three-dimensional (3D) force sensor was developed to provide the real-time measurement of tri-axial catheter contact force. The 3D force sensor consists of a plastic cubic bead and five flexible force sensors. Each flexible force sensor was made of a PEDOT:PSS strain gauge and a PDMS bump on a flexible PDMS substrate. Calibration results show that the fabricated sensor has a linear response in the force range required for RF ablation.
Sponsor: NIH R21 Grant.
Personnel: Jun Sheng
Collaborators: Dheeraj Gandhi, Rao Gullapalli, Marc Simard
Archival Publications:
- Jun Sheng and Jaydev P. Desai, “Development of a meso-scale fiberoptic rotation sensor for a torsion actuator,” IEEE Robotics and Automation Letters, 3, no.1, pp. 537-543, Jan. 2018.
- Jun Sheng, Dheeraj Gandhi, Rao Gullapalli, Marc Simard, and Jaydev P. Desai, “Development of a meso-scale SMA-based torsion actuator for image-guided procedures,” IEEE Transactions on Robotics, vol. 33, no.1, pp. 240-248, Feb. 2017.
- Jun Sheng and Jaydev P. Desai, “Design, modeling and characterization of a novel meso-scale SMA-actuated torsion actuator,” Smart Materials and Structures, vol. 24, no. 10, p. 105005 (13pp), Aug. 2015.
Refereed Conference Publications
- Jun Sheng and Jaydev P. Desai, “A highly compact fiberoptic rotation sensor for a neurosurgical robot,” 2018 IEEE International Symposium on Medical Robotics (ISMR 2018), pp. 1-6, 2018.
- Jun Sheng and Jaydev P. Desai, “A skull-mounted robotic headframe for a neurosurgical robot,” 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), pp. 2511-2516, 2017.
- Jun Sheng and Jaydev P. Desai, “A novel meso-scale SMA-actuated torsion actuator,” 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2015), 4718-4723, 2015.
- Jun Sheng and Jaydev P. Desai, “Towards a SMA-actuated neurosurgical intracerebral hemorrhage evacuation (NICHE) robot,” 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2015), pp. 3805-3810, 2015.
