Current Research
Robotic Guidewires
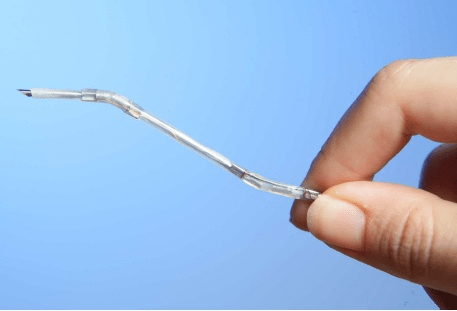
Coaxially Aligned Steerable (COAST) Guidewire
In this project, we have design and analyze robotically steerable guidewires for endovascular and cardiovascular applications. We use a femtosecond laser to machine notch joints into a Nitinol tube allowing it to bend in the plane of the notch joint with the application of a moment from a tendon. We control the notch angle of each joint using tendon tension to observe the resulting shape of the guidewire and account for the joint coupling in our model. We have also demonstrated forward-viewing capabilities for guidewires mounted with sub-mm scale Ultrasound transducers (in collaboration with Ultrasonic Imaging and Instrumentation Lab).
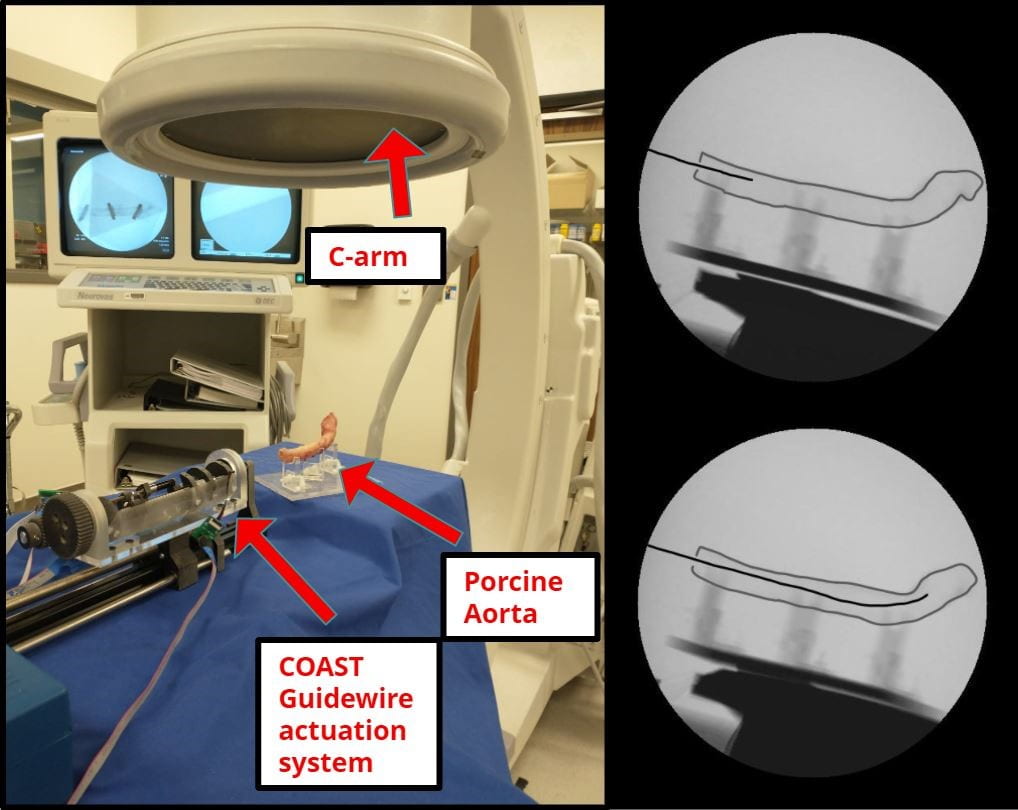
From this project, the COaxially Aligned STeerable (COAST) guidewire robot has been developed. This guidewire consists of 3 coaxially aligned tubes, the outermost having a diameter of 0.4mm, that can be translated relative to one another, allowing for the bending segment of the robot to controlled. It has been demonstrated that, through these relative movements, follow the leader motion can be achieved. This work has also explored planning algorithms for the guidewire robot in 3D, including the generation of 3D occupancy maps from a single C-arm machine, as well as the development of a compact spooling mechanism that can dispense 150cm of guidewire.
Balloon Deployment Guidewire
On this project, we expand the functionality of our tendon driven steerable guidewire robots to arrest bloodflow to prevent distal embolization in neurovascular applications. By integrating soft hydraulic elements and adding outward-buckling beams, we equip the guidewire with the ability to expand radially against the walls of the vasculature to arrest the flow through the vessel. We also model the effects of the pressurized tubes on the tendon-driven steering of the guidewire.
Robotic Neuroendoscope Tools
Robotic Pediatric Neuroendoscope Tool




The robotic pediatric neuroendoscope is a tendon-driven robotic tool with a handheld controller designed for minimally invasive surgeries for treating pediatric hydrocephalus. The tool itself is a cylindrical tube of 1.93 mm (outer diameter) that has two notch joints etched into it with a femtosecond laser. Both joints of the robotic tool are in the same plane, allowing the robot to make S-shaped curves in any plane. The plane of bending can further be changed by a rolling motion capability in the handheld controller. The resulting tool is controlled using a joystick located at the back end of the handheld controller. Thus, the robotic tool and its controller are ergonomic in their design and fully compatible with existing endoscopes used in hydrocephalus cases. With the incorporation of fiber optic deflection feedback, it has been demonstrated that the robotic tool can be utilized for determining forces acting on the tip of the robot, which can assist in mitigating unintended interactions with the environment or diagnosis through palpation. Along with the development of the robot itself, work has also been conducted to develop micro-scale, tendon-driven graspers capable of providing forces in the range of what is required for neurosurgical procedures, all whilst being compatible with the flexible robotic tool.
Single-Port Dual-Arm Neuroendoscope

The single-port dual-arm robotically steerable neuroendoscope consists of a flexible major cannula that can house an endoscope camera and two flexible minor cannulas. This robotic tool is designed for minimally invasive neurosurgeries to treat hydrocephalus and for brain tumor resection procedures. This dual-channel endoscope has a small outer diameter of 6.9 mm and a flexible trocar that can allow a larger reachable workspace compared to the state-of-the-art. The minor cannula has two bending joints capable of achieving S-shaped curves for bimanual triangulation.
Robotically Steerable Device for Bronchoalveolar Lavage (BAL)

Bronchoalveolar Lavage (BAL) is a minimally invasive procedure for diagnosing lung infections or diseases. First, a flexible bronchoscope is passed into the lungs. Then, saline is repeatedly flushed into the lung segment, then collected. Pathogens, blood, or malignant cells in the retrieved fluid are used to make a diagnosis. However, obtaining a diagnostic sample from the peripheral lungs is challenging. A higher volume of saline could be used to flush the entire lung segment, but this can lead to higher morbidity from fluid retained in the lungs. A smaller, robotically steerable bronchoscope could navigate closer to the lesion site, resulting in a larger diagnostic yield without increasing the fluid volume.
Tendon-driven notched-tube continuum robots are suitable for a robotic BAL device because they are highly miniaturizable. We conducted detailed analysis of the design of such robots. First, we developed a model for predicting the deflection of arbitrarily-shaped notches in tubes, which performed acceptably for rectangular, sinusoidal, and elliptical notch shapes. Second, we presented an algorithm for selecting a pattern of notch depths, widths, and spacings that allows a notched continuum robot to achieve an arbitrary curvature. Finally, we proposed a model predicting the shape of a continuum robot with non-identical notches, which was found to be acceptably accurate when accounting for friction.
MEMS Sensors
Integrated Sensor on Robotically Steerable Tool for Tumor Margin Identification
A piezoresistive MEMS-based force sensor is designed for brain tumor margin identification. The tumor microenvironment can cause a variation in the stiffness of the tissues which can be sensed by micro-force sensors. A MEMS- based micro-force sensor is designed by selective deposition and etching of materials on a silicon substrate. Piezoresistors are doped at the edges of the etched diaphragm for sensing forces due to the stress in the diaphragm induced upon tissue indentation. The fabricated sensor can sense forces up to 0.4 N. The sensor is integrated on a robotically steerable tool that has a diameter of 1.93 mm.
Past Research
FLEXotendon Rehabilitation Exoskeleton




The FLEXotendon glove is a voice-controlled rehabilitation exoskeleton that helps to restore hand and finger mobility/functionality in patients with upper extremity impairments, specifically spinal cord injury and stroke.The FLEXotendon glove functions through voice control and tendon actuation. The patient gives voice commands to a smartphone app, which interprets those commands and informs the exoskeleton to begin tendon actuation. Due to the biomimetic tendon routing of the exoskeleton, when the tendons of the exoskeleton are actuated, the joints of the fingers undergo angular displacement, resulting in the movement of the finger.
Robotic Transcatheter for Mitral Regurgitation
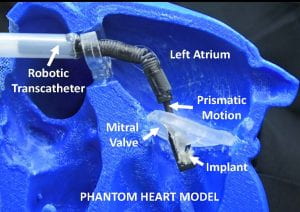
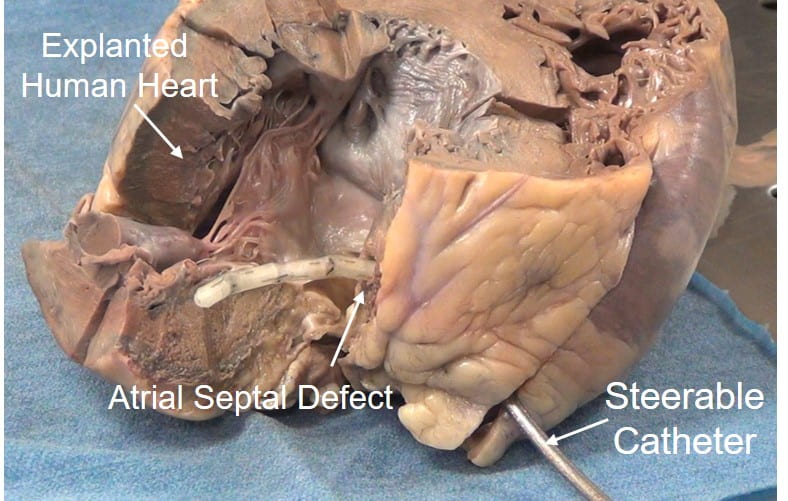
The robotic transcatheter mitral valve implant delivery system is being designed as a tendon-driven robot to treat mitral regurgitation, a heart condition where the mitral valve undergoes improper coaptation during systole. The automated 2 feet long catheter is used to deliver an implant onto the mitral valve through a minimally invasive transseptal procedure to reduce regurgitation. The robot, at the distal end of the transcatheter, has four joints: proximal torsion, bending, distal torsion, and prismatic. The proximal torsion joint controls the robot’s bending plane; the bending joint positions the implant above the mitral valve opening; the prismatic joint advances the implant below the mitral valve, and the distal torsion joint aligns the implant with mitral valve leaflets for proper implantation. For clinical relevance, the maximum outer diameter of the robot is constrained to 5.7mm. The feasibility of the robotic transcatheter system is demonstrated in a phantom heart model.
Tissue Characterization at the Micro-scale for Breast Cancer Diagnosis


Breast cancer is characterized by progressive modifications of the microenvironment of mammary tissue. Being able to monitor these tissue changes can be critical to improving clinicians’ diagnoses and designing early intervention strategies. This research project focuses on the fabrication, manipulation, and application of microengineered devices for the breast cancer diagnosis.
Minimally Invasive Neurosurgical Intracranial Robot (MINIR)

The goal of this project is to develop a fully MRI-compatible neurosurgical robot that is capable of removing brain tumor under the direct control of a surgeon using imaging information from frequently-updated MRI. We are currently working towards developing a full-scale working prototype of MINIR by incorporating remote actuation, sensing, and control along with electro-cauterization and suction and irrigation capability.
Neurosurgical Intra-Cerebral Hemorrhage Evacuation (NICHE) Robot
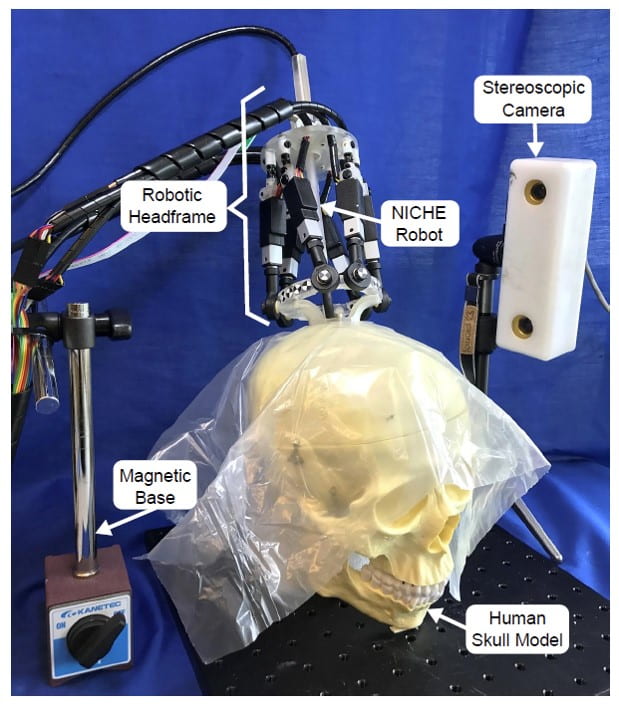
The goal of this project is to develop a compact and MRI/CT-compatible neurosurgical robot that is capable of tip articulation to efficiently remove intracerebral hemorrhage under the direct control of a surgeon using MR or CT imaging guidance. We have developed a full-scale working prototype of NICHE by incorporating smart actuation, fiberoptic sensing, and model-based control along with electro-cauterization and suction capability.
Robotic Catheter for Atrial Fibrillation (AFib) Treatment
The goal of this project is to develop a highly steerable and flexible robotic catheter to diagnose and treat atrial fibrillation. We have developed large-deflection bending modules based on shape memory alloy and an innovative actuation technique to enable simultaneous ablation and evaluation under MR imaging guidance. A flexible tri-axial force sensor has been developed by using MEMS techniques for measuring catheter tip force.
Steerable Catheter Systems
The goal of this project is to develop multi-degree-of-freedom catheters to account for the catheter placement errors and enhance catheter maneuverability. SMA actuators are located at discrete locations along the length of the catheter to generate steering forces, enable active trajectory corrections, and achieve tip articulation. This research involves SMA characterization, model-based control, motion planning, ultrasound-based tracking of the cannula, and sensor development.
Compliant Grasping using Astriction
The goal of this project is to expand the range of object shapes and sizes that can be grasped by a single manipulator. Toward that end, we have developed and patented a new grasp enhancement technology using self-sealing suction cup arrays. Many small cups can be attached to the same vacuum source and nominally self-seal. Passive reaction forces from contact with an object break the seal only on cups contacting the object, so that only those selected cups engage. All other cups remain sealed to maximize pressure differential for the engaged cups. Our design also incorporates a release mechanism using a small burst of positive pressure in the line. We are using shape memory alloy (SMA) actuators for developing a fully functional three-finger hand.
